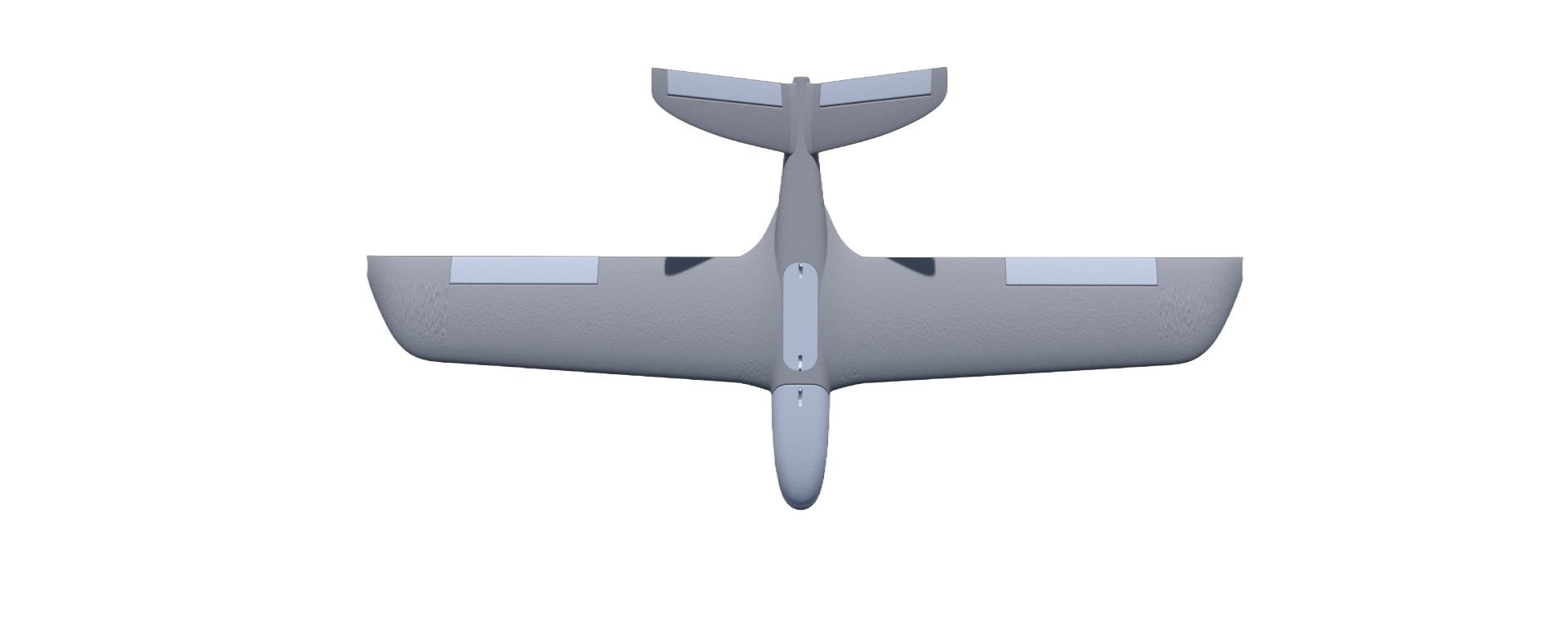
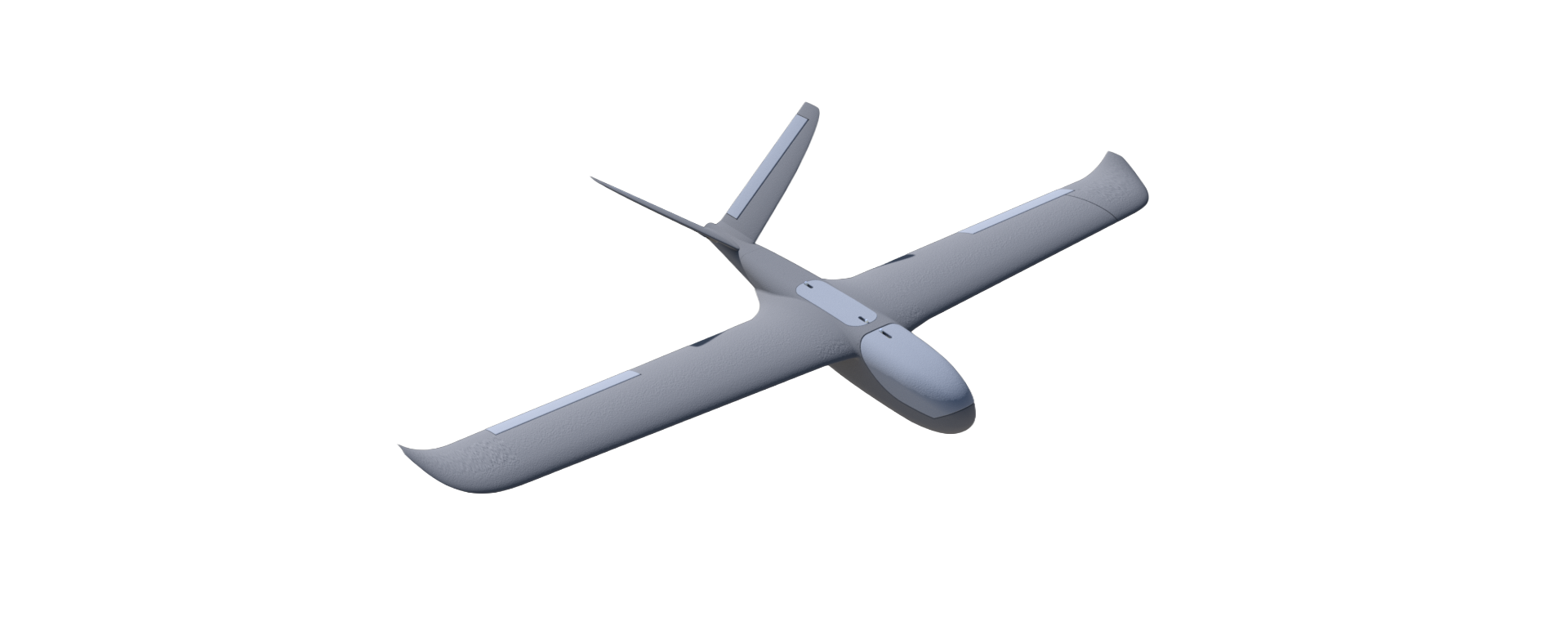
Fixed-wing
2 m Class UAV
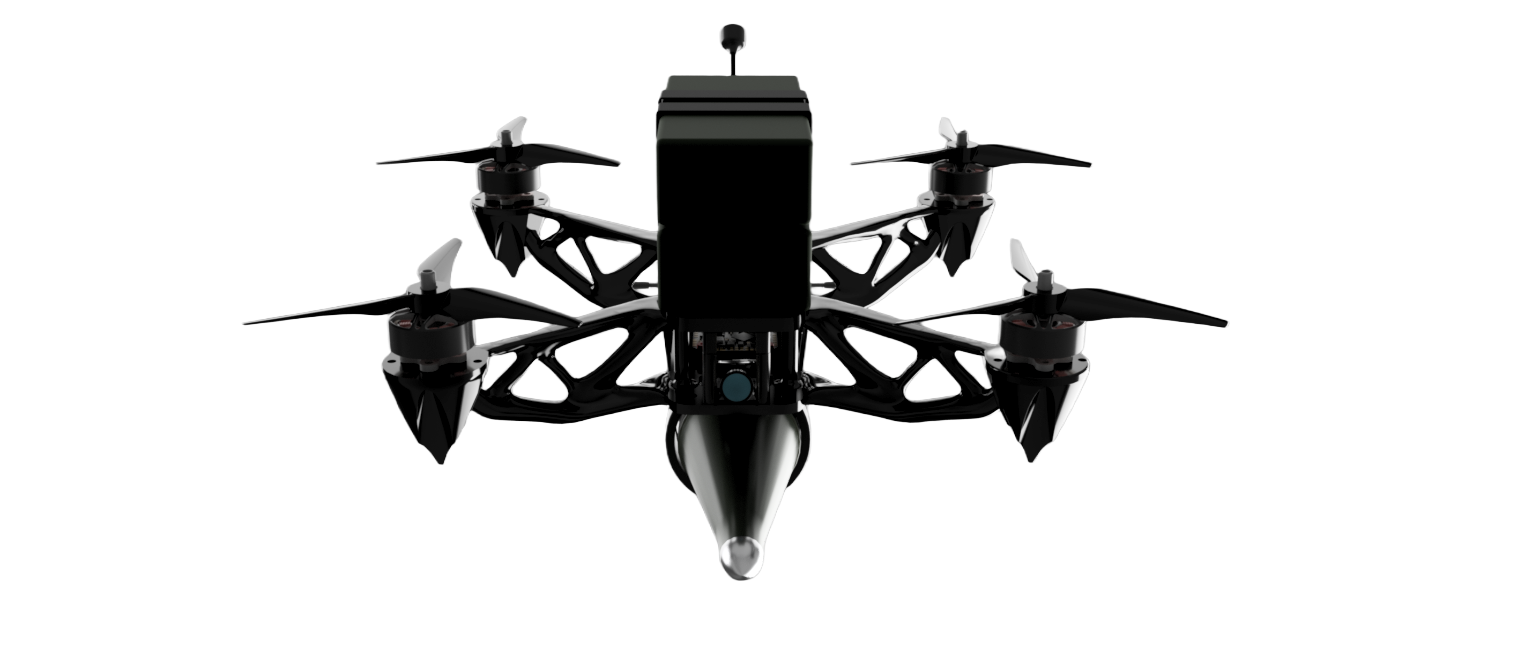
Conceptual and technical design for modular fixed-wing UAV platforms, including airframe layout, payload integration, and manufacturability constraints.
- Airframe configuration
- Payload bay planning
- Mechanical documentation